BTL200
Vectors
Summary
Introduction to Vectors
Basic Operations
Vector Operations
Vectors and Linear Systems
Introduction
Introduction
Physical quantities described by just a number: scalars
Physical quantities described by a number and a direction: vectors
More generally, vectors can represent a collection of ordered numbers
\[ \mathbf{v} = (v_{1}, v_{2}, \ldots , v_{n}) \]
Introduction
Vectors are very useful in physics to deal with concepts such as force, speed, fields, etc.
They are also useful to the treatment of data in general
Example: the cosine of the angle between two vectors is often used in text analysis to determine the similarity between documents
Basic Operations
A number of basic operations can be applied to vectors:
→ Addition
→ Subtraction
→ Multiplication by a scalar
Vector Operations
Additionaly, we can define:
→ The norm of a vector
→ The angle between two vectors
→ The dot product of two vectors
Basic Operations
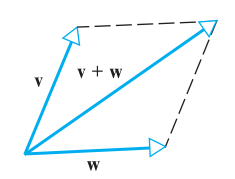
Addition
\[ \mathbf{v} + \mathbf{w} = (v_{1} + w_{1}, v_{2} + w_{2}, \ldots , v_{n} + w_{n}) \]
Subtraction
\[ \mathbf{w} - \mathbf{v} = \mathbf{w} + (- \mathbf{v}) = (w_{1} - v_{1}, w_{2} - v_{2}, \ldots , w_{n} - v_{n}) \]

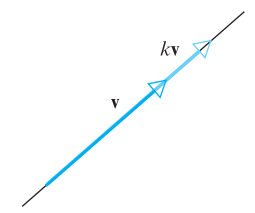
Multiplication by a Scalar
\[ k\mathbf{v} = (kv_{1}, kv_{2}, \ldots , kv_{n}) \]
Properties
Basic Operations on vectors follow these properties:
→ Commutative
→ Associative
→ Distributive (over a scalar)
→ Identities (scalar and vector)
Vector Operations
Norm
The norm of a vector is a measure of its length
It is represented by:
\[ ||\mathbf{v}|| \]
And, it can calculated as:
\[ ||\mathbf{v}|| = \sqrt{ v_{1}^{2} + v_{2}^{2} + \ldots + v_{n}^{2} } \]
Norm properties
The norm of a vector follows these properties:
\[ ||\mathbf{v}|| \geq 0 \]
\[ ||\mathbf{v}|| = 0\ \text{if and only if}\ \mathbf{v} = \mathbf{0}\]
\[ ||k\mathbf{v}|| = |k|||\mathbf{v}|| \]
Normalizing Vectors
A vector of norm 1 is called a unit vector
Vectors can be normalized:
\[ \mathbf{u} = \frac{\mathbf{v}}{||\mathbf{v}||} \]
A vector with a 1 in one position, and zeroes elsewhere is a standard unit vector
Any vector can be written as a linear combination of standard unit vectors
Distance
The distance between two vectors is defined as
\[ d (\mathbf{u}, \mathbf{v}) = ||\mathbf{u} - \mathbf{v}|| \]
\[ = \sqrt{ (u_{1} - v_{1})^{2} + (u_{2} - v_{2})^{2} + \ldots + (u_{n} - v_{n})^{2} } \]
Dot Product
The dot product of vectors u and v is defined as:
\[ \mathbf{u} \cdot \mathbf{v} = ||\mathbf{u}||||\mathbf{v}||\cos{\theta} \]
Therefore, cos(θ), can be calculated as:
\[ \frac{\mathbf{u} \cdot \mathbf{v}}{||\mathbf{u}||||\mathbf{v}||} \]
Dot Product
Using the law of cosines, one can show that:
\[ \mathbf{u} \cdot \mathbf{v} = 0.5(||\mathbf{u}||^{2} + ||\mathbf{v}||^{2}- ||\mathbf{u - v}||^{2}) \]
\[ \mathbf{u} \cdot \mathbf{v} = u_{1}v_{1} + u_{2}v_{2} + \ldots + u_{n}v_{n} \]
Dot Product Properties
The dot product follows these properties:
\[ \mathbf{u} \cdot \mathbf{v} = \mathbf{v} \cdot \mathbf{u} \]
\[ \mathbf{u} \cdot ( \mathbf{v} + \mathbf{w})= \mathbf{v} \cdot \mathbf{u} + \mathbf{v} \cdot \mathbf{w}\]
\[ k(\mathbf{u} \cdot \mathbf{v}) = (k\mathbf{u}) \cdot \mathbf{v}\]
\[ \mathbf{v} \cdot \mathbf{v} \geq 0\ \text{, and}\ \mathbf{v} \cdot \mathbf{v} = 0\ \text{if and only if}\ \mathbf{v} = \mathbf{0}\]
Vectors and Linear Systems
Introduction
Previously, we showed that two points represent a line in a plane
One can also show that a point and a vector also represent a line
\[ \mathbf{x} = \mathbf{x}_{0} + k\mathbf{v} \]
Introduction
The same way, a point and two vectors represent a plane in a 3D space
\[ \mathbf{x} = \mathbf{x}_{0} + k_{1}\mathbf{v}_{1} + k_{2}\mathbf{v}_{2} \]
Parametric Equations
Given an equation of the type:
\[ ax + by + cz = d \]
One can find its vector parametric equations as:
\[ x = \frac{1}{a}(d - bt_{1} - ct_{2}),\ y = t_{1},\ z = t_{2} \]
Parametric Equations
So, we have:
\[ (x, y, z) = (\frac{1}{a}(d - bt_{1} - ct_{2}), \frac{1}{a}t_{1}, \frac{1}{a}t_{2}) \]
Or, conversely:
\[ (x, y, z) = (\frac{d}{a}, 0, 0) + t_{1}(-\frac{b}{a}, \frac{1}{a}, 0) + t_{2}(-\frac{c}{a}, 0, \frac{1}{a}) \]
Dot Product of Linear Systems
A linear equation such as:
\[ a_{1}x_{1} + a_{2}x_{2} + \ldots + a_{n}x_{n} = b \]
Can be rewriten in dot product as:
\[ \mathbf{x}\cdot \mathbf{a} = b, \]
\[ \text{where}\ \mathbf{x} = (x_{1}, x_{2}, \ldots, x_{n})\ \text{and}\ \mathbf{a} = (a_{1}, a_{2}, \ldots, a_{n})\]
Dot Product of Linear Systems
For a homogeneous system of equations:
\[\begin{aligned} a_{11}x_{1} & + a_{12}x_{2} & + \cdots + & a_{1n}x_{n} & = 0 \\ a_{21}x_{1} & + a_{22}x_{2} & + \cdots + & a_{2n}x_{n} & = 0 \\ \vdots & + \vdots & + \cdots + & \vdots& = \vdots \\ a_{m1}x_{1} & + a_{m2}x_{2} & + \cdots + & a_{mn}x_{n} & = 0 \end{aligned} \]
Dot Product of Linear Systems
We can rewrite it as:
\[\begin{aligned} \mathbf{r}_{1}\cdot\mathbf{x} & = 0 \\ \mathbf{r}_{2}\cdot\mathbf{x} & = 0 \\ \vdots & = \vdots \\ \mathbf{r}_{m}\cdot\mathbf{x} & = 0 \end{aligned} \]
Dot Product of Linear Systems
This means that every possible solution x is orthogonal to each vector r
Example
\[\begin{bmatrix} 1 & 2 & -1 \\ 1 & 0 & -1 \\ 2 & 2 & 0 \\ \end{bmatrix} \begin{bmatrix} x_{0} \\ x_{1} \\ x_{2} \\ \end{bmatrix} = \begin{bmatrix} 0 \\ 0 \\ 0 \\ \end{bmatrix} \]
Solution
\[ (x_{0}, x_{1}, x_{2}) = t(1,0,0) - t(0,1,0) + t(0, 0, 1) \]
Dot Product of Linear Systems
The solution of each non-homogeneous system is equal to that of a homogeneous systems plus a fixed vector
Example
\[\begin{bmatrix} 1 & 2 & -1 \\ 1 & 0 & -1 \\ 2 & 2 & 0 \\ \end{bmatrix} \begin{bmatrix} x_{0} \\ x_{1} \\ x_{2} \\ \end{bmatrix} = \begin{bmatrix} 1 \\ 1 \\ 1 \\ \end{bmatrix} \]
Solution
\[ (x_{0}, x_{1}, x_{2}) = (1, 0 , 0) + t(1,0,0) - t(0,1,0) + t(0, 0, 1) \]
Suggested Reading
Textbook: Sections 3.1, 3.2, 3.3, and 3.4
Exercises
→ Section 3.1: 1, 2, 9, 10
→ Section 3.2: 1, 2, 3, 4, 9, 10, 17, 18
→ Section 3.3: 1, 2
→ Section 3.4: 20, 25, 26, 27