BTL200
Basic Transformation, Eigenvalues, and Eigenvectors
Summary
Basic Transformations
Eigenvalues and Eigenvectors
Basic Transformations
Geometric Interpretations
Many basic matrix transformations have simple geometric interpretations
Matrices can be used to perform:
→ Reflections
→ Rotations
→ Contractions
→ Expansions
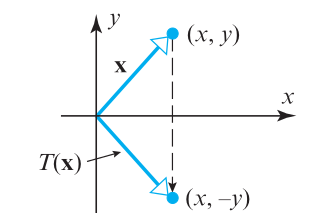
Vertical Reflection
\[ A = \begin{bmatrix} 1 & 0 \\ 0 & -1 \\ \end{bmatrix}\]
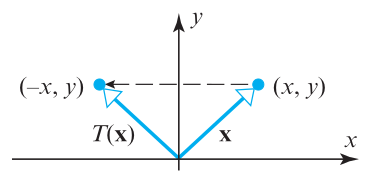
Horizantal Reflection
\[ A = \begin{bmatrix} -1 & 0 \\ 0 & 1 \\ \end{bmatrix}\]
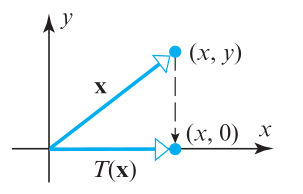
Projection
\[ A = \begin{bmatrix} 1 & 0 \\ 0 & 0 \\ \end{bmatrix}\]
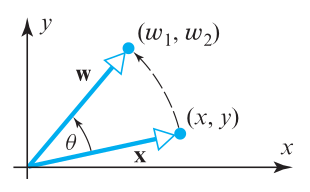
Rotations
\[ A = \begin{bmatrix} \cos(\theta) & -\sin(\theta)\\ \sin(\theta) & \cos(\theta)\\ \end{bmatrix}\]
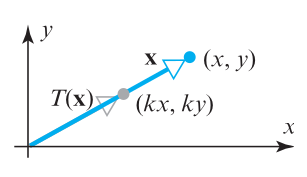
Contractions
\[ A = \begin{bmatrix} k & 0 \\ 0 & m \\ \end{bmatrix}\]
Composition of Transformations
When multiple transformations are applied, we have a composition
For example, applying transformations TA and TB is represented by:
\[ T_{BA} = T_{B} \circ T_{A}\]
As transformations are performed as matrix multiplications, so are compositions
Example
\[ T_{A} = \begin{bmatrix} 1 & 0 \\ 0 & -1 \\ \end{bmatrix}\text{, } T_{B} = \begin{bmatrix} k & 0 \\ 0 & k \\ \end{bmatrix} \]
\[ T_{BA} = T_{B} \circ T_{A} = \begin{bmatrix} k & 0 \\ 0 & k \\ \end{bmatrix} \begin{bmatrix} 1 & 0 \\ 0 & -1 \\ \end{bmatrix} = \begin{bmatrix} k & 0 \\ 0 & -k \\ \end{bmatrix}\]
Eigenvalues and Eigenvectors
Definition
If A is a square matrix, then a vector x is called an eigenvector of A if Ax is a scalar multiple of x
In other words, if we have a vector x, and a scalar λ, such that:
\[ A\mathbf{x} = \lambda \mathbf{x} \]
Then, x is an eigenvector of A, and λ is its corresponding eigenvalue

Practical uses
Eigenvalues and eigenvectors have several uses in sciences and engineering:
→ Google's PageRank
→ Machine Learning
→ Data Compression
→ Data Science (reducing dimensions)
→ Solution of Differential Equations
Interpretation
When a vector x is multiplied by a matrix A, the result can change both its magnitude as well as direction
However, for eigenvectors, only the magnitude is changed
\[ A\mathbf{x} = \lambda \mathbf{x} \]
Characteristic Equation
λ is an eigenvalue of a matrix A if, and only if, it satisfies the equation:
\[ det(\lambda I - A) = 0 \]
This is called the characteristic equation of A
Calculating eigenvalues and eigenvectors
To find eigenvalues, one must solve the characteristic equation
\[ det(\lambda I - A) = 0 \]
Then, one needs to find, for each eigenvalue, its corresponding eigenvector by solving the system:
\[ (\lambda I - A)\mathbf{x} = 0 \]
Example
\[ A = \begin{bmatrix} 2 & 1 \\ 1 & 2 \\ \end{bmatrix} \]
More Examples
\[ A = \begin{bmatrix} 4 & 1 \\ 2 & 3 \\ \end{bmatrix},\ A = \begin{bmatrix} 6 & -1 \\ 2 & 3 \\ \end{bmatrix} \]
Suggested Reading
Textbook: Sections 4.9, and 5.1 (only until page 295)
Exercises
→ Section 4.9 1, 2, 5, 6, 13, 17
→ Section 5.1 Solve provided examples in the slides